
里程碑一:2007年和2010年,斯坦福大学的Levinson博士提出了基于因子图优化建立地图的方法,以及基于粒子滤波的框架,实现基于地图的高精度定位。 参考以下文章:
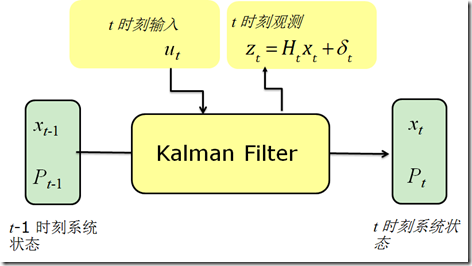
里程碑二:2017年,百度无人车开源Apollo。 定位模块采用误差卡尔曼滤波算法实现多传感器融合定位。 地图匹配部分遵循斯坦福团队的算法,但使用多个高斯对地图进行建模。 ,做了一些改进。 与当年斯坦福的粒子滤波算法相比,百度团队使用单一假设(卡尔曼滤波器)来实现多传感器融合。 从文章中的测试结果来看kalman滤波在船舶gps导航定位系统中的应用,准确率令人印象深刻。 参考以下文章:
上述两个里程碑的文章,从数据融合方法上来说,其实都属于过滤的范畴。 首先,因为必须满足一阶马尔可夫假设,历史信息被无情抛弃。 稍后我会介绍,实际上,在一些具有挑战性的场景中,历史信息可以有效地帮助估计当前状态,无论是从线性化、迭代还是时间相关性的角度,都将有助于估计当前状态。
里程碑三:有趣的是,2017年以来,各大自动驾驶汽车公司和创业团队发表的有关自动驾驶定位的文章非常少。 一方面,我不想透露我的定位算法的原理。 另一方面,如果不是非常具有挑战性的场景,例如建筑物高、交通密集的场景,现有的传感器(例如RTK)实际上可以获得很好的定位。 因此,采用标准的滤波方法可以获得较好的定位精度。 然而,如果我们真的想实现无人车在所有场景下的高精度定位,比如密集的城市地区kalman滤波在船舶gps导航定位系统中的应用,稳定的数据融合框架将非常重要。 有趣的是,在今年的 ICRA 上,百度自动驾驶团队更新了一篇新文章。 参考文章(Ding, Wendong, et al.“LiDAR Inertial Odometry Aided Robust LiDAR Localization System in Moving City Scenes.” Proceedings of the IEEE International Conference on Robotics and Automation (ICRA). IEEE(2020 年 5 月)。)。 作者对数据融合框架做了重大改动! 过滤方法改为基于因子图优化的方法; 添加了场景变化检测,最后在数据融合框架中添加了实时激光里程计。 不得不说,百度无人车队在定位方面做得非常出色。 下面分别介绍一下百度这篇文章的三大亮点:
(1)多次迭代:多次迭代有效帮助FGO逼近最优状态估计。 在TC GNSS/INS集成中,伪距观测函数是高度非线性的,EKF中的单次迭代很难达到最优。
(2)重新线性化:在FGO的每次迭代中,再次进行线性化。 由于伪距观测函数是高度非线性的,多次线性化可以有效减小线性化误差。 因此,多次迭代和重新线性化是互补的。
(3)时间相关性:FGO有效地考虑了历史信息,所有历史信息通过INS因子连接起来。 结果,历元之间的时间相关性被探索并用于抵制异常值。 也就是说,FGO适当的窗口大小有助于提高性能。

总结:科技总是在快速发展。 与传统的基于过滤的数据融合方法相比,您现在可能更关心的是,基于因子图的数据融合方法可以实时吗? 当然,因为您可以创建滑动窗口。 另外,不得不说,现在开源的优秀非线性优化求解器,比如Ceres Solver,催化了因子图优化的快速应用。 以上均为当前情况。 关于因子图的前景,在具有挑战性的场景中,实际上许多传感器的误差模型并不服从高斯分布。 然而,传统的卡尔曼滤波器依赖于传感器误差模型服从高斯分布的强假设; 与传统的卡尔曼滤波器和曼恩滤波不同,虽然因子图也要求传感器误差服从高斯分布,最近的研究(Pfeifer, Tim, and Peter Protzel. “Robust Sensor fusion with self-tuning mix models.” 2018 IEEE/ RSJ 国际智能机器人与系统会议 (IROS). IEEE, 2018.) 表明高斯混合模型可以有效应用于因子图优化。 本研究采用高斯混合模型对GNSS误差模型进行建模,最终定位精度显着提高。
参考:
[1] 杰西·莱文森、迈克尔·蒙特梅洛和塞巴斯蒂安·特龙。 “城市环境中基于地图的精确车辆定位。” 机器人学:科学与系统。 卷。 4. 2007 年。